|
Sim-and-Real Co-Training: A Simple Recipe for Vision-Based Robotic Manipulation
Abhiram Maddukuri*, Zhenyu Jiang*, Lawrence Yunliang Chen*, Soroush Nasiriany*, Yuqi Xie, Yu Fang, Wenqi Huang, Zu Wang, Zhenjia Xu, Nikita Chernyadev, Scott Reed, Ken Goldberg, Ajay Mandlekar†, Linxi Fan†, Yuke Zhu†
Robotics: Science and Systems (RSS), 2025
|

|
GR00T N1: An Open Foundation Model for Generalist Humanoid Robots
NVIDIA
Technical report, 2025
|

|
What Matters in Learning from Large-Scale Datasets for Robot Manipulation
Vaibhav Saxena, Matthew Bronars, Nadun Ranawaka Arachchige, Kuancheng Wang, Woo Chul Shin, Soroush Nasiriany, Ajay Mandlekar, Danfei Xu
International Conference on Learning Representations (ICLR), 2025
|
|
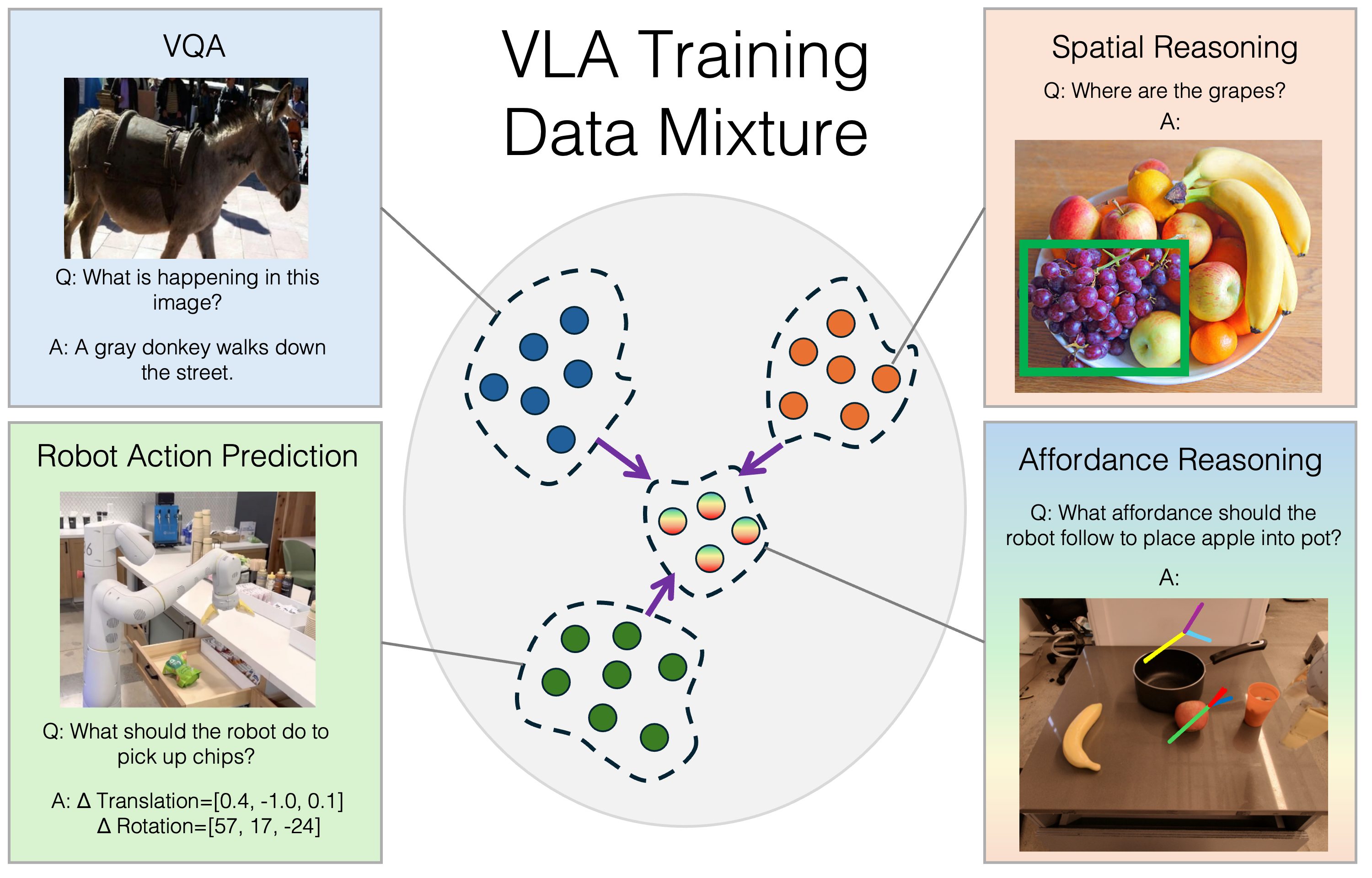
RT-Affordance: Affordances are Versatile Intermediate Representations for Robot Manipulation
Soroush Nasiriany, Sean Kirmani, Tianli Ding, Laura Smith, Yuke Zhu, Danny Driess, Dorsa Sadigh, Ted Xiao
IEEE International Conference on Robotics and Automation (ICRA), 2025
|

|
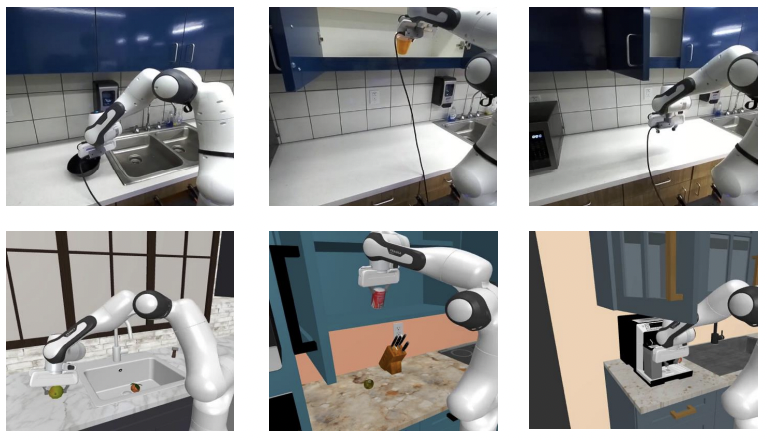
RoboCasa: Large-Scale Simulation of Everyday Tasks for Generalist Robots
Soroush Nasiriany, Abhiram Maddukuri*, Lance Zhang*, Adeet Parikh, Aaron Lo, Abhishek Joshi, Ajay Mandlekar, Yuke Zhu
Robotics: Science and Systems (RSS), 2024
|
|
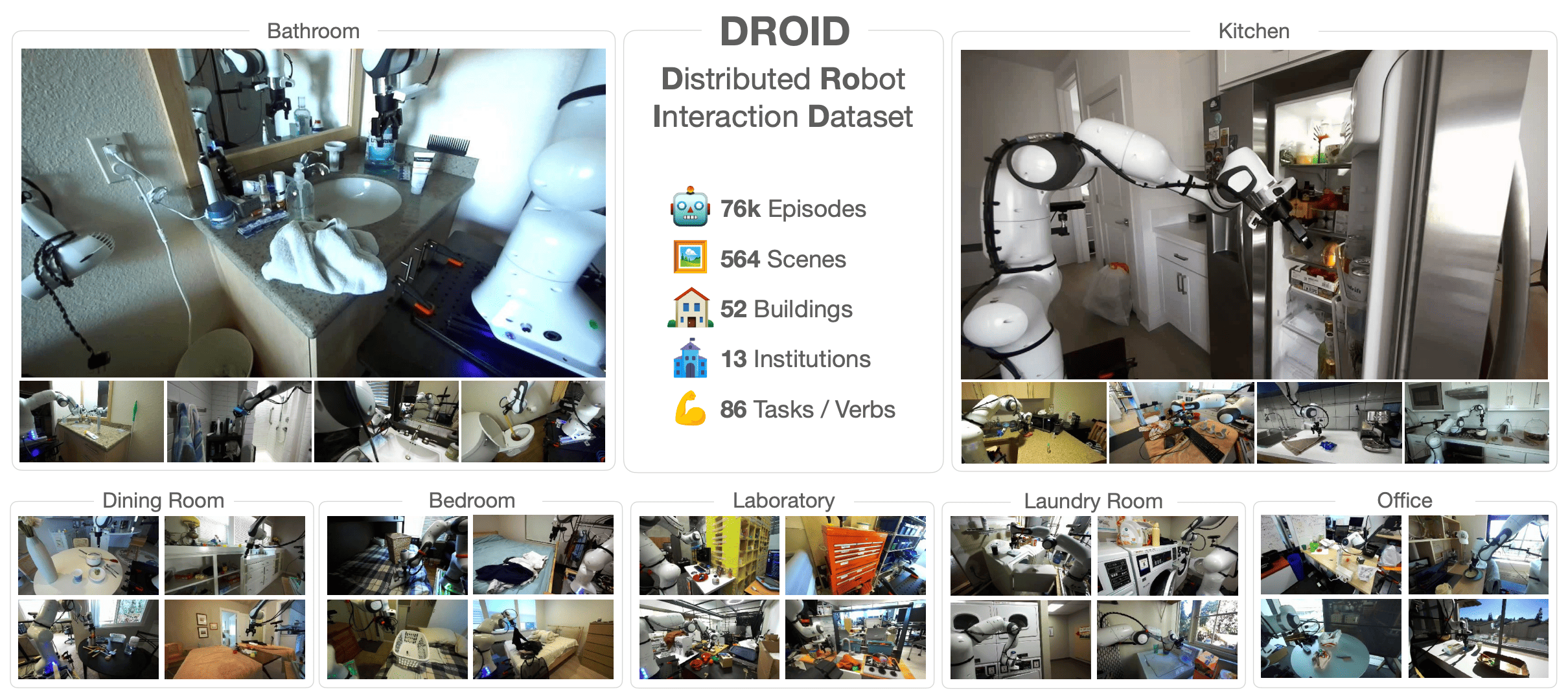
DROID: A Large-Scale In-The-Wild Robot Manipulation Dataset
Alexander Khazatsky*, Karl Pertsch*, Suraj Nair, Ashwin Balakrishna, Sudeep Dasari, Siddharth Karamcheti, Soroush Nasiriany, ..., Yuke Zhu, Thomas Kollar, Sergey Levine, Chelsea Finn
Robotics: Science and Systems (RSS), 2024
|
|
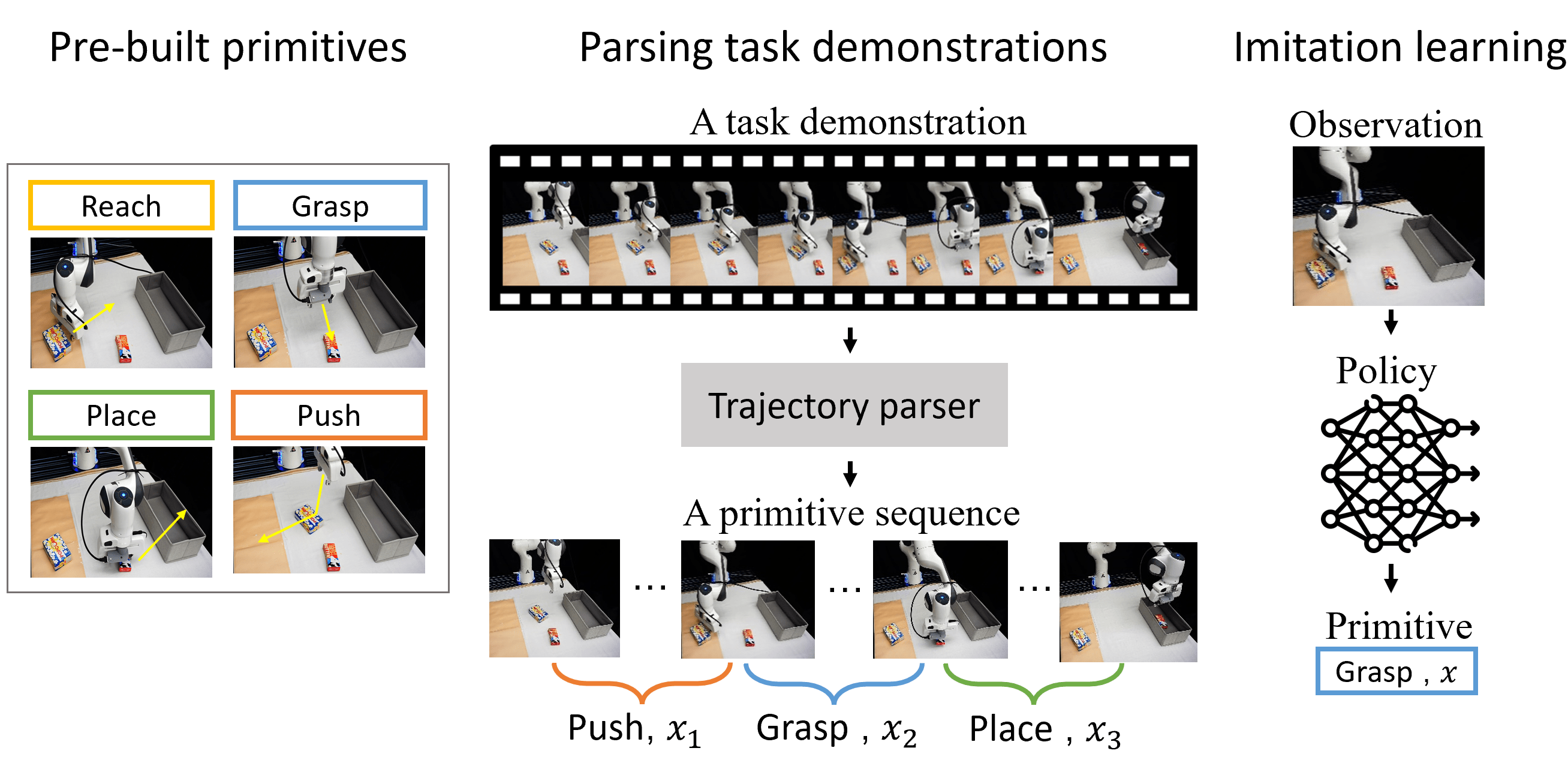
PRIME: Scaffolding Manipulation Tasks with Behavior Primitives for Data-Efficient Imitation Learning
Tian Gao, Soroush Nasiriany, Huihan Liu, Quantao Yang, Yuke Zhu
IEEE Robotics and Automation Letters (RA-L), 2024
|
|
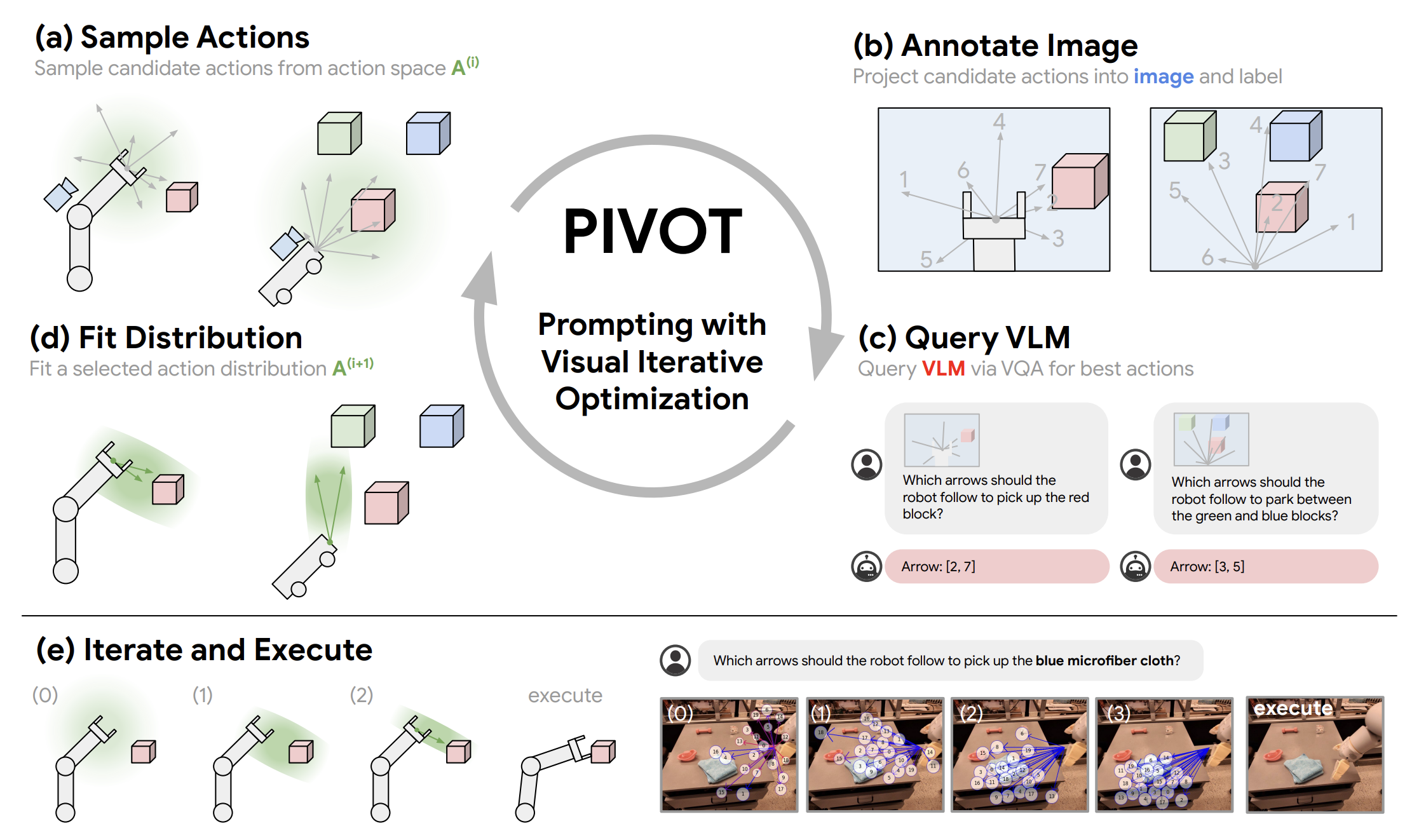
PIVOT: Iterative Visual Prompting Elicits Actionable Knowledge for VLMs
Soroush Nasiriany*, Fei Xia*, Wenhao Yu*, Ted Xiao*, Jacky Liang, Ishita Dasgupta, Annie Xie, Danny Driess, Ayzaan Wahid, Zhuo Xu, Quan Vuong, Tingnan Zhang, Tsang-Wei Edward Lee, Kuang-Huei Lee, Peng Xu, Sean Kirmani, Yuke Zhu, Andy Zeng, Karol Hausman, Nicolas Heess, Chelsea Finn, Sergey Levine, Brian Ichter*
International Conference on Machine Learning (ICML), 2024
|
|
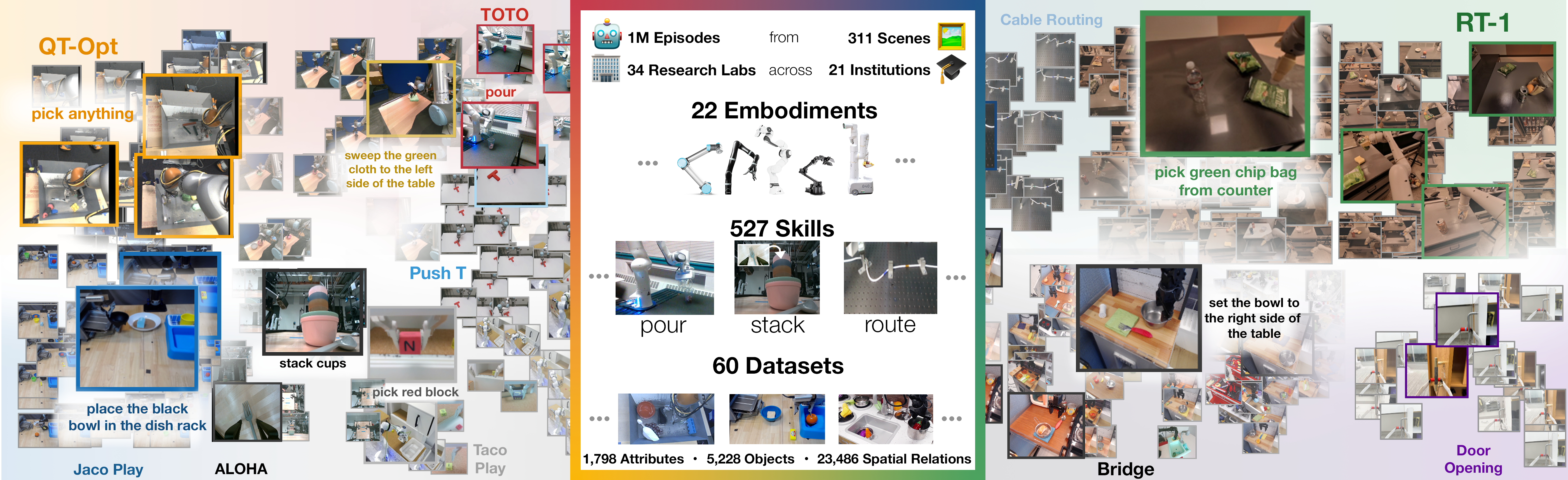
Open X-Embodiment: Robotic Learning Datasets and RT-X Models
Open X-Embodiment Collaboration
IEEE International Conference on Robotics and Automation (ICRA), 2024
|
|
MimicGen: A Data Generation System for Scalable Robot Learning using Human Demonstrations
Ajay Mandlekar, Soroush Nasiriany*, Bowen Wen*, Iretiayo Akinola, Yashraj Narang, Linxi Fan, Yuke Zhu, Dieter Fox
Conference on Robot Learning (CoRL), 2023
|
|
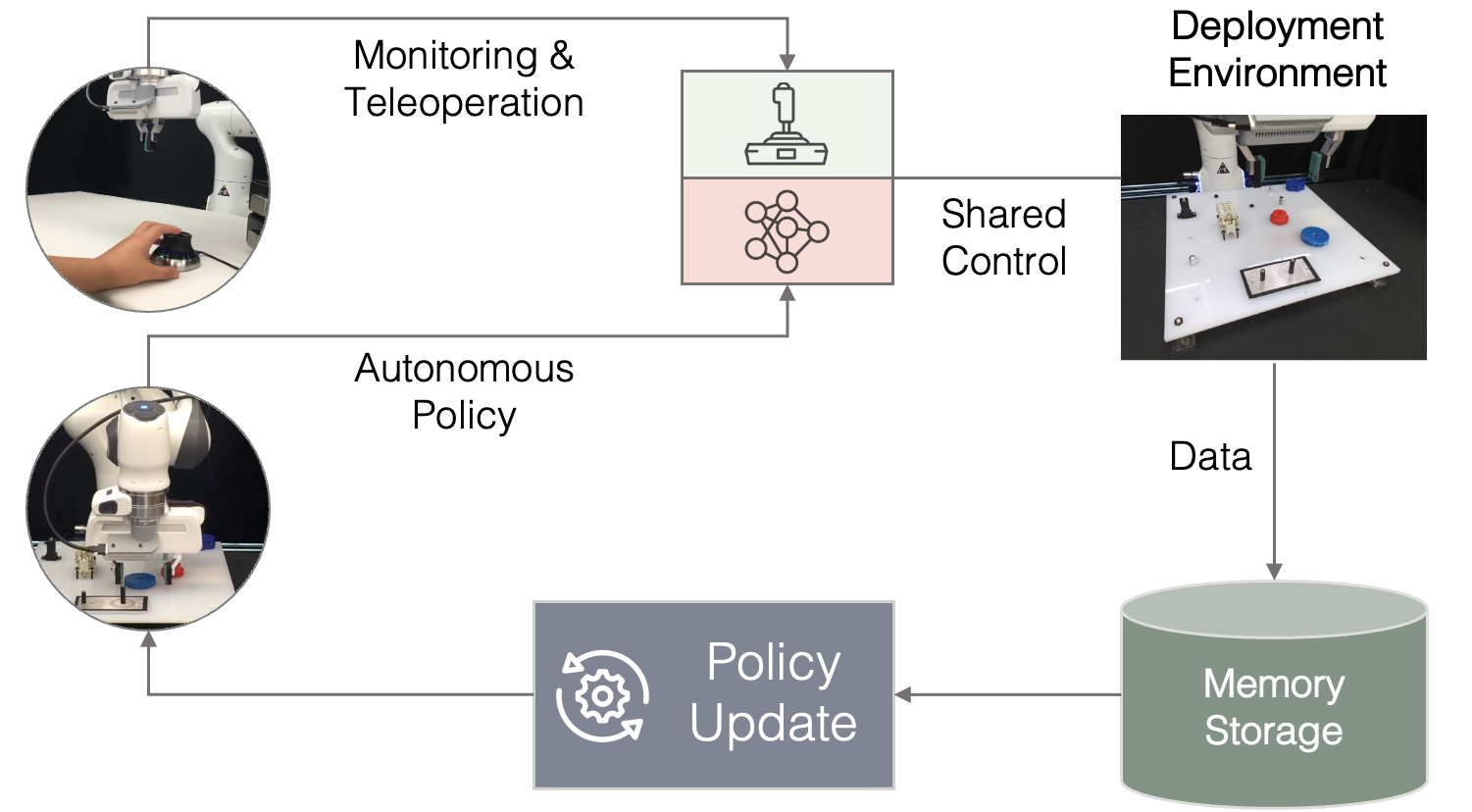
Robot Learning on the Job: Human-in-the-Loop Manipulation and Learning During Deployment
Huihan Liu, Soroush Nasiriany, Lance Zhang, Zhiyao Bao, Yuke Zhu
Robotics: Science and Systems (RSS), 2023
Best Paper Award Finalist
|
|
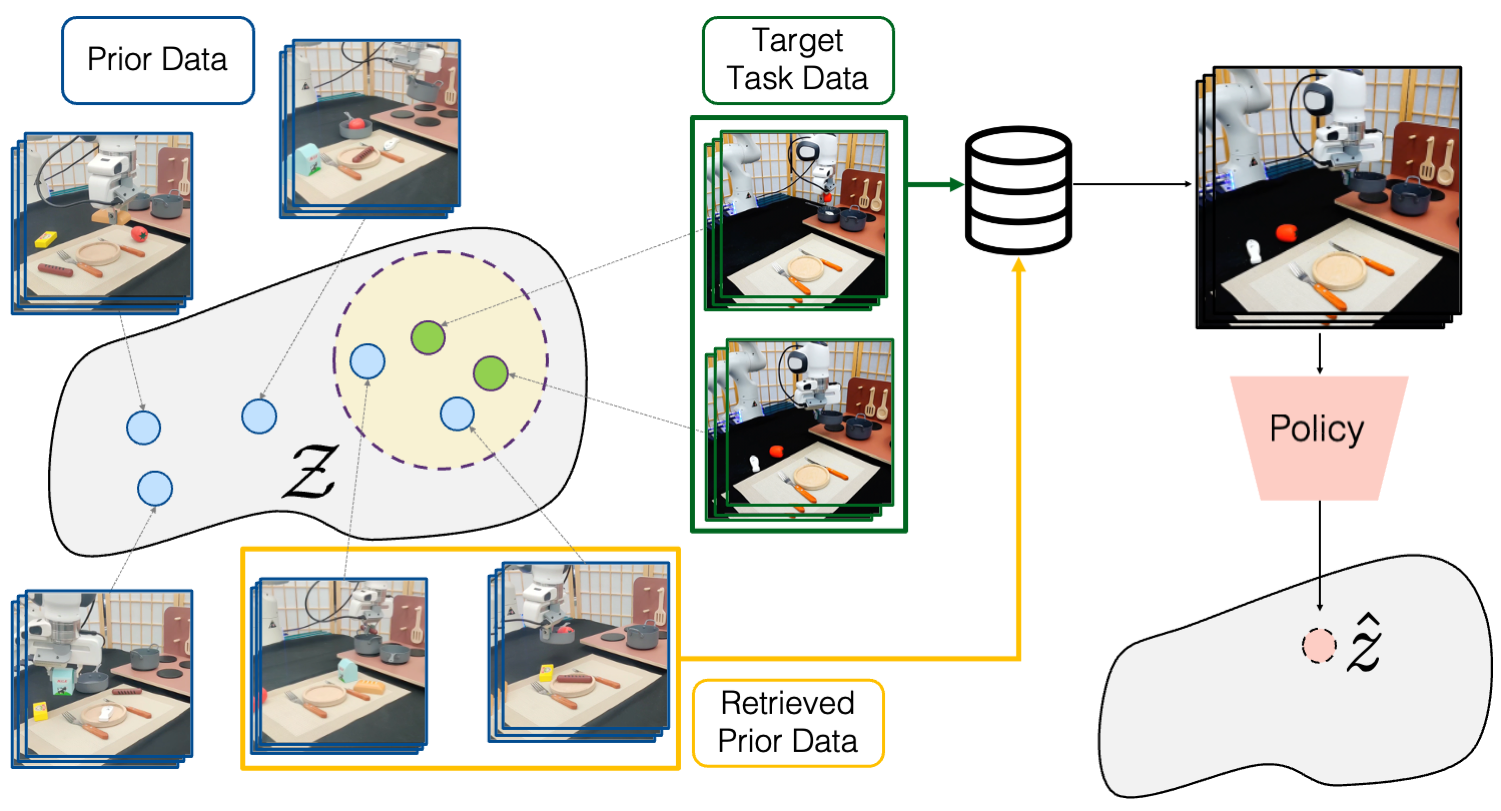
Learning and Retrieval from Prior Data for Skill-based Imitation Learning
Soroush Nasiriany, Tian Gao, Ajay Mandlekar, Yuke Zhu
Conference on Robot Learning (CoRL), 2022
|
|
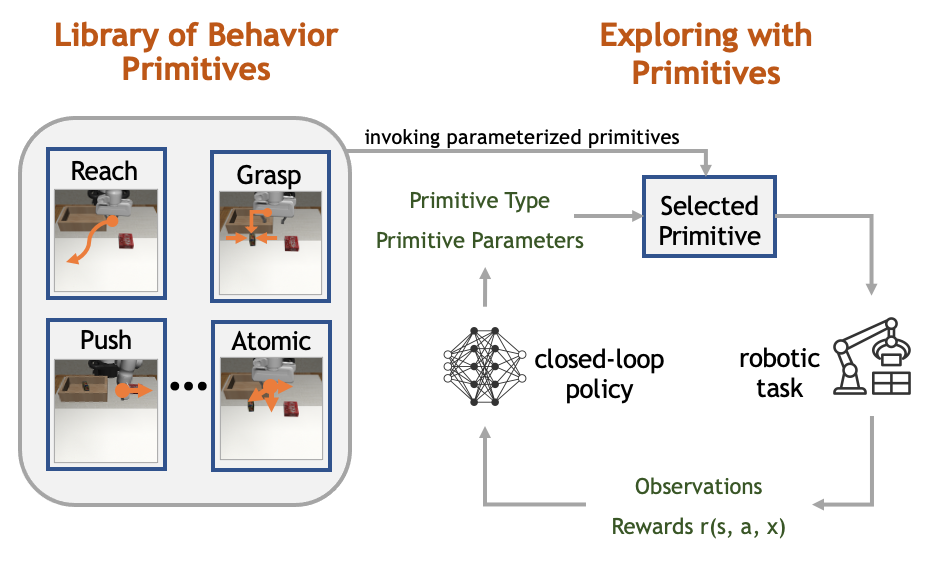
Augmenting Reinforcement Learning with Behavior Primitives for Diverse Manipulation Tasks
Soroush Nasiriany, Huihan Liu, Yuke Zhu
IEEE International Conference on Robotics and Automation (ICRA), 2022
Outstanding Learning Paper
|
|
What Matters in Learning from Offline Human Demonstrations for Robot Manipulation
Ajay Mandlekar, Danfei Xu, Josiah Wong, Soroush Nasiriany, Chen Wang, Rohun Kulkarni, Li Fei-Fei, Silvio Savarese, Yuke Zhu, Roberto Martín-Martín
Conference on Robot Learning (CoRL), 2021
Oral Presentation
|

|
robosuite: A Modular Simulation Framework and Benchmark for Robot Learning
Yuke Zhu, Josiah Wong, Ajay Mandlekar, Roberto Mart ́ın-Mart ́ın, Abhishek Joshi, Soroush Nasiriany, Yifeng Zhu
Technical report, 2020
|
|
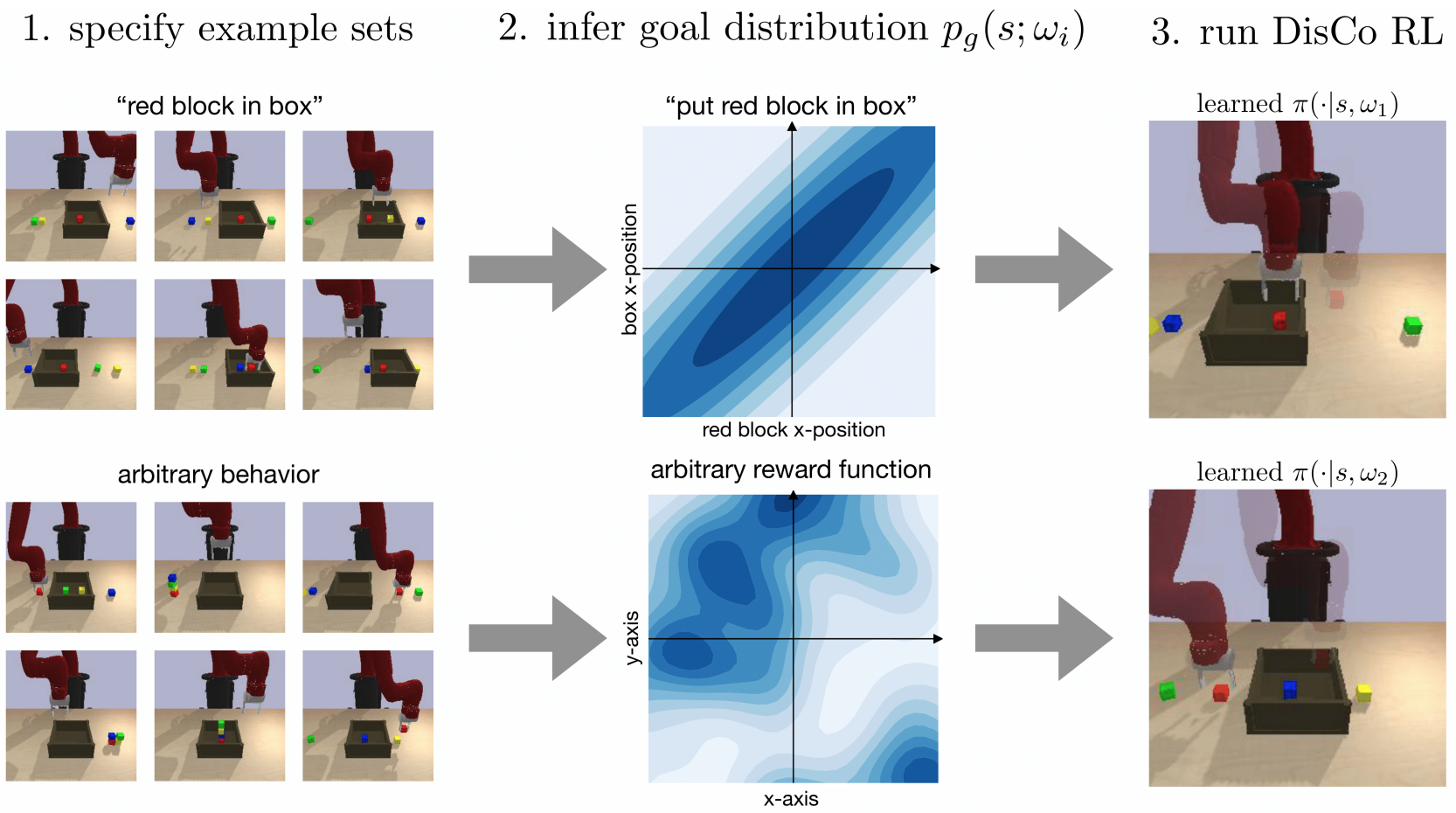
DisCo RL: Distribution-Conditioned Reinforcement Learning for General-Purpose Policies
Soroush Nasiriany*, Vitchyr H. Pong*, Ashvin Nair*, Alexander Khazatsky, Glen Berseth, Sergey Levine
IEEE International Conference on Robotics and Automation (ICRA), 2021
|
|
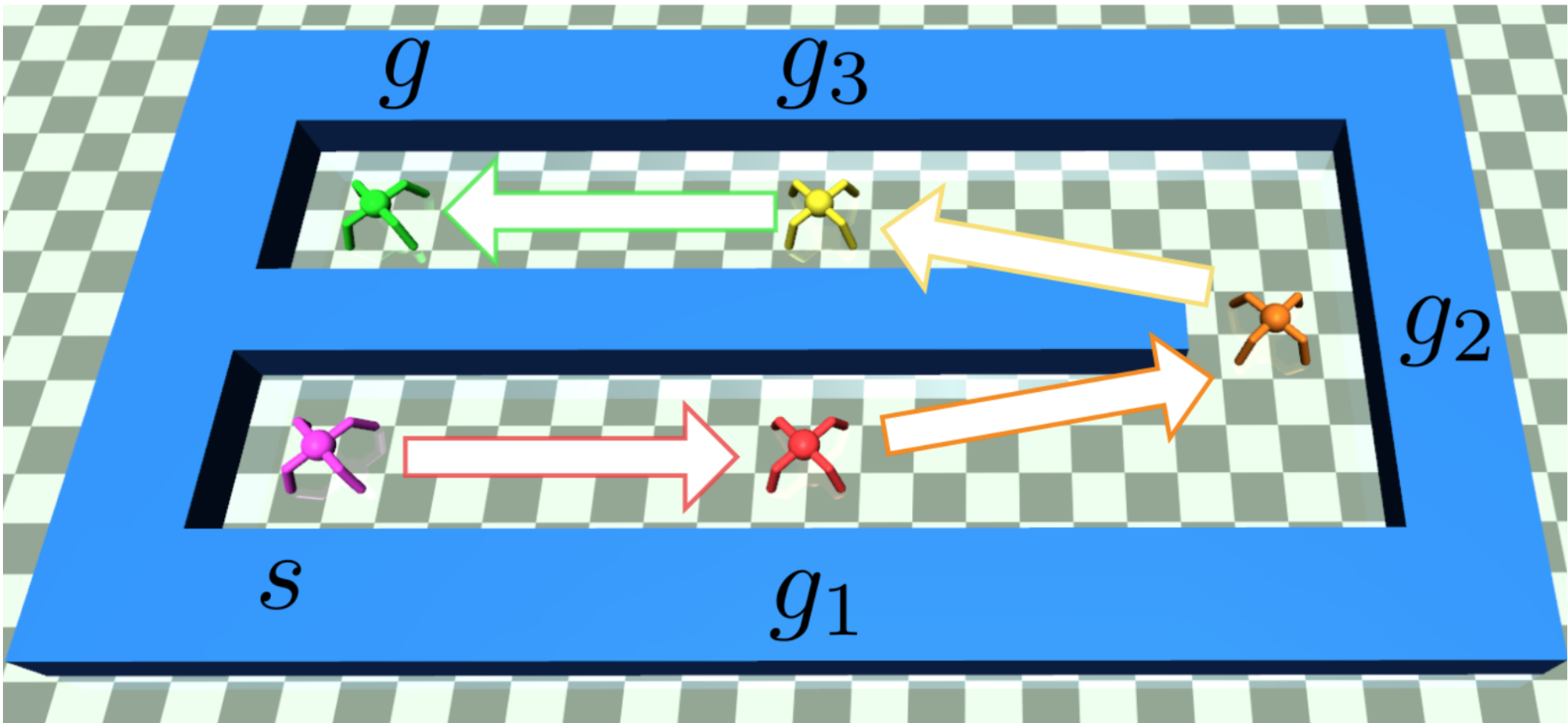
Planning with Goal-Conditioned Policies
Soroush Nasiriany*, Vitchyr H. Pong*, Steven Lin, Sergey Levine
Advances in Neural Information Processing Systems, 2019
|
